28YBJ-48 DC 5V 4 фазы 5 проводовый шаговый двигатель с драйверной платой ULN2003
US$3.99
Часть обзора переведена автоматически.
Tried this with an Arduino Uno using the MotorKnob example sketch http://arduino.cc/en/Tutorial/MotorKnob Works fine and the 64:1 gearbox gives fairly high output torque. I found by experiment that the connection to Arduino is not obvious: Arduino pin 8 to in 1 (motor blue wire), pin 9 to in3 (motor yellow), pin 10 to in 2 (motor pink), pin 11 to in 4 (motor orange). My first attempt connecting the wires in sequence (8 to in1, 9 to in2 etc) resulted in the motor only turning in one direction! The motor draws about 250 mA at 5V so best to use a separate supply, remember to connect the 0V to one of the Arduino GND pins.
Very good Nagyon jó





Instead of swapping connections around as suggested by other reviewers, I kept the connections in order and edited the sketch. I am using digital outputs D5 to D8 so used this pin assignment: #define motorPin1 5 #define motorPin2 7 #define motorPin3 6 #define motorPin4 8 I find the motor works at 15 RPM but does not work at 20 RPM; this is to be expected for a stepper motor. Torque is surprisingly good. It is not clear what the jumper adjacent to the +5V header pin is for.
Хорошо упакованы и прибыли в объявленное время. Платы управления двигателем индивидуально завернуты в статические пластиковые пакеты, что является хорошим прикосновением. Все выглядит точно так, как описано. Не могу дождаться, когда они будут установлены в проекте. Рекомендую.




Bem упакован, соблюдает ожидания. Быстрая международная доставка.

Llego dentro del plazo estimado, en perfectas condiciones, sin aparentes golpes en los productos. Todo en orden.



pas tester encore mais bon materiel !!




bien



Excellent motor & controller for the price


Worked great for me on the arduino. After I used the AccelStepper Lib. (much better timing and more efficient control than the standard lib). Caveat: Only worked when I initialized the AccelStepper lib with Pin 2 and 3 swapped and Half Step Mode: AccelStepper stepper(AccelStepper::HALF4WIRE, motorPin1, motorPin3, motorPin2, motorPin4);

DC-DC 7-28V в 5V 3A Снижение модуля источника питания Buck Converter Заменить LM2596

5 шт. Мини DC-DC регулируемый модуль источника питания 12V 24V на 5V 3.3V 9V 3A mini360

Мини DC-DC регулируемый модуль источника питания 12V 24V на 5V 3.3V 9V 3A mini360

Geekcreit® 5A XL4005 DC-DC регулируемый модуль преобразователя питания



4A XL6009E1 Регулируемый DC-DC повышающий преобразователь модуль питания

5шт. DC-DC 3V-35V на 4V-40V регулируемый модуль повышения напряжения 3V 5V 12V на 19V 24V 30V 36V


3Pcs 4A XL6009E1 Регулируемый DC-DC шаговый повышающий преобразователь модуль источника питания

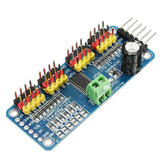
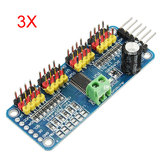
PCA9685 16-канальный 12-битный драйвер сервоприводов PWM I2C модуль


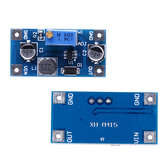
2A 2V-24V to 3V 5V 6V 9V 12V 19V DC-DC Boost Step Up Voltage Converter Power Supply Module XH-M415

Полупроводниковый модуль управления двигателем BTS7960B H-моста 5В 43А




24V / 12V к 5V 5A DC-DC снижающий модуль питания модуль преобразователя мощности

10 шт. плата драйвера шагового двигателя с двумя мостами L298N от Geekcreit


Плата модуля зарядки литий-ионных аккумуляторов USB с интеграцией зарядного и защитного устройства






WZ5020L DC-DC 50V 20A 1000Вт Buck Converter CC CV Step-down блок питания Регулируемое напряжение



TB6560 3A CNC роутер 1 осевая плата драйвера шагового двигателя


RIDEN® AC110V/220V to DC 68V 1500W Регулируемый импульсный источник питания для RD6024



RIDEN® AC110V / 220V в DC 68V 1200W Регулируемый источник питания с переключением для RD6018


10 шт. Модуль регулятора напряжения постоянного тока LM2596 с регулировкой шага вниз и дисплеем




20 шт. Мини 1A Зарядное устройство для литий-ионных аккумуляторов платы модуля USB интерфейса

AC 220V 4000W SCR Регулятор напряжения диммер электронный регулятор скорости двигателя