Точные детали:
Спецификации ФК
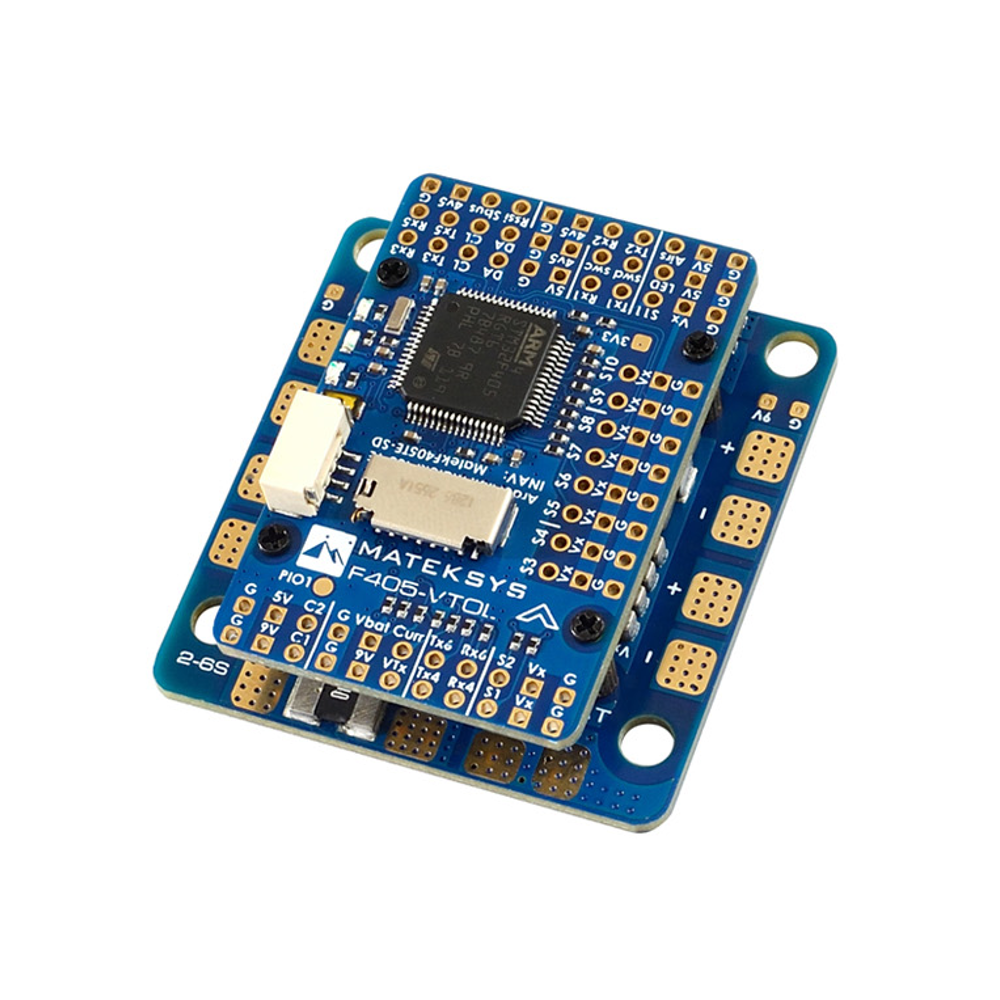
МКУ: STM32F405RGT6, 168 МГц, 1 МБ Флэш
IMU: ICM42688-P
Баро: SPL06-001
ОСД: AT7456E
Черный ящик: слот для карты MicroSD
6x UART, 1x опция Softserial_Tx(INAV)
12x Выходов PWM
1x I2C
4x ADC (VBAT, Ток, RSSI, Аэроскорость)
1x запасной PINIO
USB / Удлинитель сигнала со звуковым сигналом с разъемом Type-C(USB2.0)
Встроенный инвертор на UART2-RX для входа SBUS
Переключаемый двойной вход камеры
FC Прошивка
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD (INAV 5.0 или более новая)
Прошивка для контроллера полета Нажмите здесь
PDB
Диапазон входного напряжения: 6.8-30В (2-6S LiPo)
Сопротивление сенсора: 100A непрерывное, 220A пиковое
5x питательные площадки ESC, общая нагрузка до 100A
Поддерживает непрерывную нагрузку до 100А на площадке ESC рядом с резистором датчика тока
Поддержка непрерывной нагрузки до 30А и пиковой нагрузки до 50А на каждом шлейфе регулятора скорости квадрокоптера
Делитель напряжения батареи 1К : 20К (Шкала 2100 в INAV, BATT_VOLT_MULT 21.0 в ArduPilot)
Текущий датчик: 220A, 3.3V АЦП (Масштаб 150 в INAV, 66.7 А/В в ArduPilot)
BEC 5V выход
Разработан для контроллера полета, приемника, OSD, камеры, звукового сигнала, LED-ленты 2812, GPS-модуля, AirSpeed
Постоянный ток: 2 ампера
BEC 9V / 12V выход
Разработано для видеопередатчика, камеры, стабилизатора и т.д.
Постоянный ток: 2 ампера
12V опция с платой-переключателем
для стабильного выходного напряжения 9В/12В, входное напряжение должно быть больше выходного на 1В
Выход BEC Vx
Разработанный для сервоуправления
Напряжение регулируется, 5V по умолчанию, 6V или 7,2V через перемычку
Постоянный ток: 8 Ампер, максимально 10А
для стабильного выхода Vx входное напряжение должно быть больше напряжения Vx на 1 В
BEC 3.3V выход
Разработан для модуля барометра / компаса и внешних периферийных устройств с напряжением 3,3 В
Линейный регулятор
Постоянный ток: 200мА
Физический
Монтаж: 25 x 25мм-Φ2мм, 35 x 35мм-Φ4мм
Габариты: 45 х 42 х 15 мм
Вес: 25 г с адаптером USB/звуковым сигналом
Включая
1x F405-VTOL
1x USB (Type-C) / пищалка (пассивный гудок) продлитель + 20 см кабель JST-SH-6P к JST-SH-6P для USB продлителя.
1x 20 см кабель JST-GH-4P кабель для порта I2C
1x конденсатор Rubycon ZLH 35V 470uF
Dupont 2.54 контакта (Доска доставляется несваренной)
Макет

Проводка ВТОЛ (ArduPlane)
Обычная проводка самолета (INAV)
ИНАВ-картографирование
PINIO
PINIO1 /PIO1 плата, по умолчанию низкий уровень, переключаемый на низкий/высокий уровень режимом- USER1
PINIO2 предназначен для переключения входа камеры пользователем 2 по режимам
Советы
F405-VTOL имеет предварительно загруженную прошивку INAV для QC
Скачайте INAV (Цель MATEKF405TE_SD) fw 5.x или новее непосредственно из INAV конфигуратора 5.x или новее.
ArduPilot Картирование
Телеметрия Frsky Smartport
неперевёрнутый (взломанный) сигнал S.Port
любой запасной Uart_TX
Серийный порт_Скорость 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 или 10 (для yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (режим опроса)
Релей (PINIO)
PINIO1, плата PIO1, низкий уровень по умолчанию
PINIO2, Переключатель камеры, C1 ПО УМОЛЧАНИЮ ВКЛ.
#
PA4 PINIO1 ВЫХОД GPIO(81) НИЗКИЙ //Пин PIO1
PB5 PINIO2 ВЫХОД GPIO(82) НИЗКИЙ //переключение камеры
# RCx_OPTION: Вариант ввода RC
28 Реле Вкл/Выкл
34 Реле 2 Вкл./Выкл.
35 Реле3 Вкл/Выкл
36/4 Реле Вкл/Выкл
например
RELAY_PIN 81 //PIO1 GPIO
RC7_OPTION 28 //Включение/выключение реле, используйте CH7 передатчика для управления уровнем PIO1 в низком или высоком состоянии
RELAY_PIN2 82 //GPIO переключатель камеры
RC8_OPTION 34 //Включение/выключение реле2, используйте CH8 передатчика для управления высоким/низким уровнем на панели PB5
Настроенная функция будет запущена, когда значение ШИМ дополнительного переключателя станет выше 1800. Она будет деактивирована, когда значение упадет ниже 1200.
Проверьте значение ШИМ,отправляемое от передатчика,когда переключатель находится в положении высокого и низкого уровня,используя экран "Калибровка радио" в Initial Setup >> Mandatory Hardware >> Mission Planner. Если значение не поднимается выше 1800 или не опускается ниже 1200,лучше отрегулировать конечные точки сервопривода на передатчике.
Советы
F405-VTOL имеет предварительно загруженную прошивку INAV для QC
Целевая плата MATEKF405TE_SD не указана в INAV Configurator 4.x.x, поддерживается INAV5.0 или новее
ArduPilot fw, 'Ошибка внутри 0x4000 l:213 spi_fail' предупреждение, пожалуйста, установите LOG_BACKEND_TYPE = 1 (Файл) для записи журнала на SD-карту.