Точные детали:
L298N L298P 4A Двухканальный модуль моторного драйвера Моторный щит R3 Для
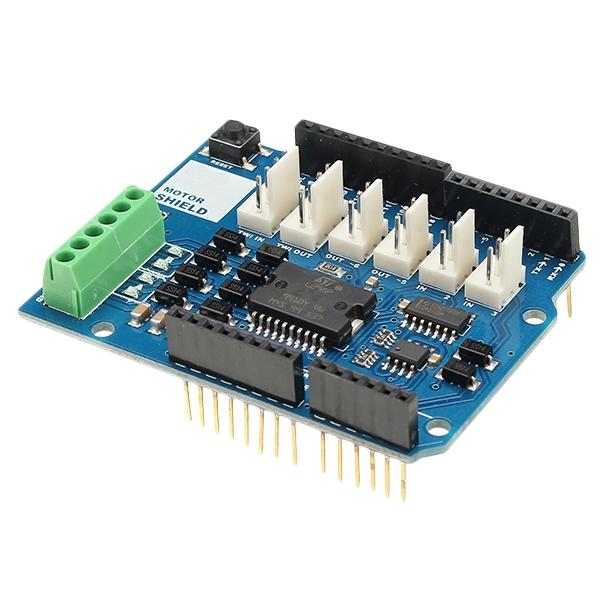
Описание: Моторный щит основан на L298, который является двойным полным мостом драйвера, предназначенным для управления индуктивными нагрузками, такими как реле, соленоиды, постоянные и шаговые моторы. Он позволяет управлять двумя постоянными токовыми двигателями с вашей платой, контролируя скорость и направление каждого независимо. Вы также можете измерить поглощение моторного тока каждого двигателя, и другие функции. Щит
TinkerKit совместимый, что означает, что вы можете быстро создавать проекты, подсоединяя
TinkerKit модули на плате.
Функция: - Рабочее напряжение: 5В ~ 12В
- Контроллер двигателя:
L298Pуправляет двумя постоянным током двигателями или одним шаговым двигателем
- Максимальный ток: 2А на канал или 4А максимум (со внешним источником питания)
- Текущее обнаружение: 1,65В/A
- Бесплатная функция остановки и торможения
О власти: Моторный щит должен питаться только от внешнего источника питанияПоскольку на щитке установлен микросхема L298 с двумя отдельными подключениями питания: одно для логики и одно для драйвера питания двигателя. Требуемый ток для двигателя часто превышает максимальное значение номинального тока USB.
Внешнее (не-USB) напряжение может поступать как от сетевого адаптера переменного тока в постоянный ток (сетевой адаптер), так и от аккумулятора. Адаптер можно подключить, вставив 2,1-мм центрально-положительный штекер в разъем питания платы силового усилителя, на которой установлен модуль управления двигателем, или подсоединить провода, которые направляют питание к клеммам Вин и GND, обращая внимание на полярности.
Чтобы избежать возможного повреждения платы, на которой установлен щиток,
Мы рекомендуем использовать внешний источник питания, который обеспечивает напряжение от 7 до 12ВЕсли вашему двигателю требуется более 9V, мы рекомендуем отделить кабель питания щита и платы, на которой он установлен. Это возможно, отрезав перемычку "Вин Connect", расположенную на задней стороне щита.
Абсолютный предел напряжения Вин на винтовых терминалах составляет 18 В.
Входы питания следующие:
Вин на винтовом клеммном блоке к экрану подключено входное напряжение для двигателя. Внешний источник питания, подключенный к этому контакту, также обеспечивает питание для платы, на которой он установлен. Отсоединив перемычку "Вин Connect", вы создаете отдельный кабель питания для двигателя.
GND Заземление на винтовом клеммном блоке.
Щит может поставлять 2 ампера на каждый канал, в общей сложности максимум 4 ампера. О вводе и выводе: Этот щит имеет два отдельных канала, называемых A и B, каждый из которых использует 4 контакта для управления или определения состояния двигателя. Всего на этом щите используется 8 контактов. Вы можете использовать каждый канал отдельно для управления двумя постоянными током двигателями или объединить их для управления одним однополярным шаговым двигателем.
Колышки щита, разделенные по каналам, показаны в таблице ниже:
| Функция | значков в Ч. A | четкий на канал Б |
| Направление | D12 | D13 |
| PWM | D3 | D11 |
| Тормоз | D9 | D8 |
| Текущее считывание | A0 | A1 |
Если вам не нужны тормозная система и датчик тока, и если вам также требуется больше пинов для вашего приложения, вы можете отключить эти функции, перерезав соответствующие перемычки на задней стороне щита.
На щите предусмотрены дополнительные розетки, описанные следующим образом:
Винтовой терминал для подключения двигателей и их источника питания.
2 разъема TinkerKit для двух аналоговых входов (белые), подключенных к A2 и A3.
2 разъема TinkerKit для двух аналоговых выходов (оранжевые в середине), подключенные к ШИМ-выходам на пинах D5 и D6.
2 коннектора TinkerKit для TWI-интерфейса (белые с 4-мя контактами), один для ввода и другой для вывода. Подключение двигателей: DC-мотор с щетками. Вы можете управлять двумя DC-моторами с щетками, подключив два провода каждого в клеммники отверстий (+) и (-) для каждого канала A и B. Таким образом, вы можете контролировать его направление, устанавливая в HIGH или LOW пины DIR A и DIR B, вы можете контролировать скорость, изменяя значения цикла работы ШИМ A и ШИМ B. Пины Тормоз A и Тормоз B, если установлены в HIGH, эффективно тормозят DC-моторы, а не позволяют им замедляться, отключая питание. Вы можете измерять ток, проходящий через DC-мотор, считывая пины SNS0 и SNS1. На каждом канале будет напряжение, пропорциональное измеренному току, которое можно считать как обычный аналоговый вход через функцию analogRead() на аналоговых входах A0 и A1. Для вашего удобства он калибруется на 3.3V, когда канал выдаёт свой максимально возможный ток, то есть 2A.
В пакет включено: 1 x Модуль моторного драйвера